
SIGNAL TIMING
ON A SHOESTRING
Publication Number: FHWA-HOP-07-006
TASK ORDER UNDER CONTRACT NUMBER: DTFH61-01-C-00183
MARCH 2005

Notice
This document is disseminated
under the sponsorship of the
Department of Transportation in
the interest of information
exchange. The United States
Government assumes no liability
for its contents or use thereof.

Technical Report Documentation Page
1. Report No.
FHWA-HOP-07-006
2. Government Accession No.
3. Recipient's Catalog No.
5. Report Date
March, 2005
4. Title and Subtitle
Signal Timing on a Shoestring
6. Performing Organization Code
7. Author(s)
Henry, RD
8. Performing Organization Report No.
10. Work Unit No. (TRAIS)
9. Performing Organization Name and Addres
Sabra,Wang & Associates, Inc.
s
1504 Joh Avenue, Suite 160
Baltimore, MD 21227
11. Contract or Grant No.
13. Type of Report and Period Covered
12. Sponsoring Agency Name and Address
Office of Travel Management
Federal Highway Administration
400 Seventh Street
Washington, DC 20590
14. Sponsoring Agency Code
15. Supplementary Notes
COTR: Pamela Crenshaw, John Halkias
Reviewers: Mike Schauer, Ed Fok
16. Abstract
The conventional approach to signal timing optimization and field deployment requires current
traffic flow data, experience with optimization models, familiarity with the signal controller
hardware, and knowledge of field operations including signal timing fine-tuning. Developing new
signal timing parameters for efficient traffic flow is a time-consuming and expensive undertaking.
This report examines various cost-effective techniques that can be used to generate good signal
timing plans that can be employed when there are insufficient financial resources to generate the
plans using conventional techniques. The report identifies a general, eight-step process that leads
to new signal plans: 1) Identify System Intersections; 2) Collect and Organize Existing Data; 3)
Conduct a Site Survey; 4) Obtain Turning Movement Data; 5) Calculate Local Timing Parameters;
6) Identify Signal Groupings; 7) Calculate Coordination Parameters; and 8) Install and Evaluate
New Plans. The report examines each of these steps and identifies procedures that can be used to
minimize costs in each step. Special emphasis is placed on the costs of turning movement counts.
The report develops a “tool box” of procedures and provides examples of how the tool box can be
used when there is a moderate signal timing budget, when there is a modest signal timing budget,
and when there is a minimum signal timing budget.
17. Key Word
Signal timing, turning movement data, signal
timing optimization, time-space diagrams,
manual methods, cycle, split, and offset.
18. Distribution Statement
19. Securi Classif. (of this report) ty
20. Securi y Classif. (of this page) t
21. No. of Pages
22. Price
Form DOT F 1700.7 (8-72) Reproduction of completed page authorized
i
Table of Contents
I. Introduction.............................................................................................................................1
Intended Audience ...................................................................................................................1
Classical Signal Timing Process .............................................................................................2
Data Collection .....................................................................................................................2
Optimization.........................................................................................................................5
Installation and Evaluation (Field Adjustments) ..............................................................7
Report Structure ......................................................................................................................7
II. Signal Timing Process...........................................................................................................9
1 – Identify the System Intersections.....................................................................................9
2 – Collect and Organize Existing Data .................................................................................9
3 – Conduct Site Survey ........................................................................................................10
4 – Obtain Turning Movement Data.....................................................................................12
5 – Calculate Local Timing Parameters ...............................................................................12
6 – Identify Signal Groupings ...............................................................................................12
7 – Calculate Coordination Parameters ...............................................................................13
8 – Install and Evaluate New Plans .....................................................................................13
III. Signal Timing Tool Box......................................................................................................15
Data Collection Tools.............................................................................................................15
Intersection Categorization ...............................................................................................15
Short-Count Method...........................................................................................................16
Estimated Turning Movements.........................................................................................17
Signal Grouping .....................................................................................................................17
Coupling Index ...................................................................................................................17
Major Traffic Flows ............................................................................................................19
Coordinatability Factor......................................................................................................19
Number of Timing Plans .......................................................................................................19
Cycle Length Issues ...............................................................................................................20
Webster’s Equation ............................................................................................................20
Greenshields-Poisson Method ...........................................................................................21
Cycle Length.......................................................................................................................23
Offset Issues...........................................................................................................................24
ii
One-Way Offset ..................................................................................................................25
Two-Way Offsets (Kell Method).........................................................................................26
Split Issues .............................................................................................................................28
Critical Movement Method ................................................................................................28
IV. Local Controller Parameters..............................................................................................30
Actuated Controller Timing Principles.................................................................................30
Basic Actuated Phase Settings..............................................................................................31
Minimum Green (Initial) ...................................................................................................31
Extension (Passage) ...........................................................................................................32
Maximum Green.................................................................................................................32
Yellow..................................................................................................................................33
Red ......................................................................................................................................33
Pedestrian Parameters..........................................................................................................33
Walk ....................................................................................................................................34
Flashing Don’t Walk ..........................................................................................................34
Volume-Density Phase Settings............................................................................................34
Variable Initial ...................................................................................................................34
Gap Reduction ....................................................................................................................35
Controller Timing Parameters Summary.............................................................................35
V. Coordination Timing Issues ................................................................................................37
Resonant Cycle.......................................................................................................................37
Intersection Categories..........................................................................................................38
Number of Timing Plans .......................................................................................................39
Using the Tool Box.................................................................................................................39
VI. Signal Timing Examples....................................................................................................41
Moderate Signal Timing Budget ...........................................................................................41
1 – Identify the System Intersections ...............................................................................41
2 – Collect and Organize Existing Data............................................................................41
3 – Conduct Site Survey.....................................................................................................41
4 – Obtain Turning Movement Data .................................................................................42
5 – Calculate Local Timing Parameters............................................................................42
6 – Identify Signal Groupings............................................................................................42
7 – Calculate Coordination Parameters............................................................................42
8 – Install and Evaluate New Plans..................................................................................42
iii
Modest Signal Timing Budget...............................................................................................43
1 – Identify the System Intersections ...............................................................................43
2 – Collect and Organize Existing Data............................................................................43
3 – Conduct Site Survey.....................................................................................................44
4 – Obtain Turning Movement Data .................................................................................44
5 – Calculate Local Timing Parameters............................................................................44
6 – Identify Signal Groupings............................................................................................44
7 – Calculate Coordination Parameters............................................................................44
8 – Install and Evaluate New Plans..................................................................................45
Minimum Signal Timing Budget ..........................................................................................45
1 – Identify the System Intersections ...............................................................................45
2 – Collect and Organize Existing Data............................................................................45
3 – Conduct Site Survey.....................................................................................................45
4 – Obtain Turning Movement Data .................................................................................46
5 – Calculate Local Timing Parameters............................................................................46
6 – Identify Signal Groupings............................................................................................46
7 – Calculate Coordination Parameters............................................................................46
8 – Install and Evaluate New Plans..................................................................................47
iv

I. Introduction
Research and experience has shown that retiming traffic signals is one of the most cost-
effective tasks that an agency can do to improve traffic flow. Traffic flow improvements of
up to 26 percent have been reported
1
. In spite of this potential, many Traffic Engineers
simply do not have the budgetary resources to conduct a signal retiming program using the
conventional methods.
The conventional approach to signal timing optimization and field deployment requires
current traffic flow data, experience with optimization models, familiarity with the signal
controller hardware, and knowledge of field operations including signal timing fine-tuning.
To many practitioners, this is a daunting process that is best left to be performed by others
at a time in the indefinite future. Setting new signal timing parameters for efficient traffic
flow is time-consuming and expensive. Typically, this process involves five distinct steps:
1. Organizing existing information,
2. Collecting new traffic flow data in the field,
3. Coding and running signal timing optimization program(s),
4. Validating and selecting optimum signal timing settings, and
5. Installing and fine-tuning new signal timing plans in signal controllers in the
street.
There are, however, practitioners in the field who have developed practical and cost-
effective means to shortcut these tasks, and still generate signal timing plans that can
approximate the effectiveness of signal timing developed using the formal modeling process.
We refer to these plans as “near-optimum” plans. It is not reasonable to expect the same
quality signal timing output from a shortcut method as from the formal, costly process.
However, when faced with a lack of resources such that signal timing by conventional
means is not possible, these shortcut methods should be considered—rather than not
retiming the signals.
This report examines the informal traffic signal timing process and defines the various
methods that can be used to minimize the cost of generating near-optimum signal timing
settings. This effort places a primary emphasis on updating the signal timing in an arterial
corridor. In short, this effort investigates how signal timing plans can be developed and
updated efficiently at the lowest possible cost.
Intended Audience
The intended audience for this report includes administrators, managers, engineers, and
technicians who are trying to maintain the best possible signal settings with less than
optimal budgets. The report assembles a body of knowledge related to signal timing that is
structured to be useful to those who are responsible for making the constant signal timing
adjustments necessary to meet the ever-increasing traffic demands.
1
“Managing Traffic Flow through Signal Timing,” S. Lawrence Paulson, Public Roads, January/February 2002, Vol. 65, No. 4.
1
Classical Signal Timing Process
Signal timing is a task that frequently involves coordinating activities of many different
departments of the jurisdiction. For example, it is not unusual for the Planning
Department to provide the traffic counts and mapping data, and for the Traffic Engineering
Department to conduct the timing optimization analysis, with the Maintenance Shop
performing the actual parameter installation. It is important to recognize that the signal
timing process is not simply executing a computer program; rather, it is a continuing series
of tasks that involve persons with many different skills. Two of the most prominent are the
traffic engineer and the traffic signal technician. The engineer typically uses a software
model, such as PASSER™ II or Synchro, to derive the timing plan, which is defined in
terms of a cycle length, split, and offset. These data are then provided to the traffic signal
technician who must convert these variables into the timing parameters used by the
controller.
It is useful to examine the entire signal timing process as it is commonly practiced today in
many cities and counties. The complete process is probably more complex than one might
expect. Figure 1 illustrates the major activities and interfaces that are typically followed to
update signal settings. Whether the process is applied to a single intersection or to an
entire city, the steps are the same. It is also interesting to note that the same steps must
be followed whether the process is entirely manual or completely automated. Each of the
major activities of the signal timing process is described below.
In the real world, the signal timing process begins with a “Trigger Event.” This event may
be as benign as a scheduled activity to retime the controller every few years. More likely,
however, the impetus for new signal timing is a citizen complaint (e.g., “The light is too
short”), a major change in the road network (e.g., widening of the existing arterial), or a
significant change in demand (e.g., opening of a shopping center). Whatever the cause, the
initial response is usually a review of the existing timing and equipment to ensure there is
no hardware failure. One of the most common signal timing complaints is that the phase
time is too short. This is frequently a result of a detector malfunction. The initial response,
then, is to confirm that the hardware is operational and the timing parameters are
operating as planned. After the Trigger Event, there are two basic paths through the
process: Field Adjustments and System Retiming.
The “Field Adjustment” path is shown in Figure 1 as the path directly below the
“Determine Type of Timing Problem” box. This path is entirely empirical and intuitive, and
produces results only as good as the experience of the person performing the adjustments.
The other path is the one on which we will focus most of our attention. This path begins
with a data collection effort and continues through an optimization process to generate and
install new system timing parameters. There are three primary activities involved in the
Classical Signal Timing Process: Data Collection, Optimization, and
Installation/Evaluation.
Data Collection
Signal retiming is not making simple adjustments to a few timing parameters in a
controller. Most jurisdictions follow a more complicated effort to retime a signal or group of
signals using modern computer programs and procedures. This path involves the more
complex activities that are indicated in Figure 1 to the right of the “Field Adjustment” path.
There are two broad categories of data that are required by the process: turning movement
2

counts and network descriptive data. The user must maintain accurate records of all
timing input data for this process to be effective.
Determine
Type of Timing
Problem
Field
Adjustment
?
Trigger Event
Yes
No
Looks
OK
?
Yes
No
Timing Process
Complete
Current
Count Data
?
No
Current
Descriptive
Data ?
No
Adjust
and
observe
Turning
Movement
Counts
Field
Inventroy
Yes
Yes
Run
Optimization
Program
Parameter Changes
Time and Date
Manually Recorded
Prepare
Optimization
Program
Input
Results
Look
OK
?
Convert
Output to
Controller
Format
Yes
Identify
Problem
No
Enter Data
Into
Controller
Figure 1. Classical Approach to Signal Timing.
3
Turning Movement Counts
This path through the flow chart begins with a determination of whether
there is adequate traffic count data. For the most part, the necessary data
includes turning movement counts that reflect the traffic demand. Most
traffic engineers consider four plans to be the minimum required for proper
signal operation: the AM peak plan, day plan, PM peak plan, and night plan.
Therefore, a basic need is to have a turning movement count for each of these
four periods. In areas near major shopping venues, there may be additional
needs for unique timing plans that are related to shopping demand.
While this seems simple enough, it is not inexpensive. Collecting these data
typically costs in the range of $500 to $1,000 or more per intersection.
Converting the raw count data into a format useful for analysis easily can
double the cost. This is an area where significant progress has been made.
For example, one vendor, Jamar Technologies Inc., makes an electronic data
collection board that is easy to use, accurate, and reliable. Although an
observer is still required to record the movements, once the observations are
completed, the data are easily uploaded to a computer for further processing.
The more elegant solution to this problem, however, is to collect the data
using existing system and local detectors and derive a complete traffic
volume network with all turning movement from these detector data.
Several systems, such as QuicNet/4, MIST, Pyramids, and Actra (and there
are likely others), have the capability to export traffic count data from
existing count stations. The missing capability is to be able to use this
information to build a complete network turning movement schedule.
Traffic count data must be considered in two dimensions: temporal and
spatial. In the temporal dimension, traffic count data at any one point varies
from period to period as traffic demand ebbs and flows. In the spatial
dimension, we frequently require traffic count data at many different
intersections for the same time period. In addition, to accommodate certain
flows through a series of intersections, we need to know the upstream origin
of the demand for each turning movement at the downstream intersection.
The need for traffic counts is not a unique demand for signal timing; most
Traffic engineering endeavors require traffic count information. Traffic
signal timing, however, does require accurate turning movement counts.
Turning movement counts (or estimates) are fundamental to developing
timing plans. These counts must be estimated in such a way as to represent
traffic demand. In other words, one must be sure that the count information
truly represents traffic demand and not just the traffic that was able to get
through the intersection with the existing signal settings. A related issue to
be aware of is the possibility that the traffic counted on a particular approach
is actually constrained by the signal settings at the upstream intersection
feeding that approach.
Descriptive Data
All signal optimization and simulation models, even manual signal timing
procedures, require a physical description of the network. This description
4

includes distance between intersections (link length), the number of lanes,
lane width and grade, permitted traffic movements from each lane, and the
traffic signal phase that services the flow. Building a network from scratch is
a significant undertaking. But once the network is defined, in general, only
traffic demand and signal timing parameters have to be updated to test a
new scenario.
An implied issue in this step is identification of which intersections are to be
included in the system. While this is a trivial issue for many simple
networks, it can be a difficult problem to resolve in the more complex
networks. In general, signals should operate as a system when adjacent
intersections have similar cycle length requirements and there are significant
benefits to be derived from controlling the offset. When the cycle length
requirements are within 15 seconds of one another and the distance between
intersections is less than 0.5 miles, many traffic engineers feel that the
signals should be coordinated. These issues will be explained in more detail
in later sections of this document.
Optimization
Once the data are collected, the final step is to generate the optimized signal settings.
While this task can be accomplished manually (later sections of this report describe
some manual techniques), most engineers use a computer program. There are a
number of computer programs that can be used to generate signal timing parameters.
These programs can be placed into one of two categories: those developed by the
private sector and those developed by the public sector. The programs developed by
the private sector tend to be more expensive to purchase, but also tend to be updated
more frequently. The programs developed by the public sector tend to be more
thoroughly vetted by the research community. Three of the more popular programs of
this type are Synchro, PASSER™ II, and Transyt-7F. The Federal Highway
Administration’s (FHWA’s) Traffic Analysis Toolbox provides additional resources
(
http://www.ops.fhwa.dot.gov/trafficanalysistools/toolbox.htm).
Synchro
Synchro is a macroscopic traffic signal timing tool that can be used to
optimize signal timing parameters for isolated intersections, arteries, and
networks. It produces useful time-space diagrams for interactive fine-tuning.
Synchro can analyze fully actuated coordinated signal systems by mimicking
the operation of a National Electrical Manufacturers Association (NEMA)
controller, including permissive periods and force-off points. Using a mouse,
the user can draw either individual intersections or a network of intersecting
arteries, and also can import .DXF map files of individual intersections or
city maps. The program has no limitations on the number of links and nodes.
Synchro is designed to optimize cycle lengths, splits, offsets, and left-turn
phase sequence using proprietary logic. The program also optimizes multiple
cycle lengths and performs coordination analysis. When performing
coordination analysis, Synchro determines which intersections should be
coordinated and those that should run free. The decision process is based on
5
an analysis of each pair of adjacent intersections to determine the
“coordinatability factor” for the links between them.
Synchro calculates intersection and approach delays either based on the
Highway Capacity Manual (HCM) or a proprietary method. The major
difference between the HCM method and the Synchro method is treatment of
actuated controllers. The HCM procedures for calculating delays and level of
service (LOS) are embedded in Synchro; thus, the user does not need to use
HCM software.
Synchro has unique visual displays, including an interactive traffic flow
diagram. The user can change the offsets and splits with a mouse, then
observe the impacts on delay, stops, and LOS for the individual intersections,
as well as the entire network.
PASSER™ II
PASSER™ II (Progression Analysis and Signal System Evaluation Routine)
was originally developed in 1974 by the Texas Transportation Institute (TTI).
PASSER™ II is an arterial-based, bandwidth optimizer, which determines
phase sequences, cycle length, and offsets for a maximum of 20 intersections
in a single run. Splits are determined using an analytical (Webster’s)
method, but are fine-tuned to improve progression. PASSER™ II assumes
equivalent pre-timed control.
PASSER™ II requires traffic flow and geometric data, such as design hour
turning volumes, saturation flow rates, minimum phase lengths, distances
between intersections, cruise speeds, and allowable phase sequencing at each
intersection. The PASSER™ II timing outputs include design phase
sequences, cycle length, splits, and offsets, and include a time-space diagram.
Performance measures include volume-to-capacity ratio, average delay, total
delay, fuel consumption, number of stops, queue length, bandwidth efficiency,
and LOS. In addition to the time-space diagram, PASSER™ II has a
dynamic progression simulator that allows the user to visualize the
movement of vehicles along the artery using the design timing plan.
There are two other versions of PASSER™ that are available, PASSER™ III
and PASSER™ IV. PASSER™ III is a diamond interchange signal
optimization program, and PASSER™ IV is a program that is used to
optimize a network of traffic signals that is based on maximizing bandwidths.
Transyt-7F
Transyt-7F (TRAffic Network StudY Tool, version 7, Federal) is designed to
optimize traffic signal systems for arteries and networks. The program
accepts user inputs on signal timing and phase sequences, geometric
conditions, operational parameters, and traffic volumes. Transyt-7F is
applied at the arterial or network level, where a consistent set of traffic
conditions is apparent and the traffic signal system hardware can be
integrated and coordinated with respect to a fixed cycle length and
coordinated offsets. Although Transyt-7F can emulate actuated controllers,
its application is limited in this area.
6
Transyt-7F optimizes signal timing by performing a macroscopic simulation
of traffic flow within small time increments while signal timing parameters
are varied. Design includes cycle length, offsets, and splits based on
optimizing such objective functions as increasing progression opportunities;
reducing delay, stops, and fuel consumption; reducing total operating cost; or
a combination of these.
Unique features of Transyt-7F include the program’s ability to analyze
double cycling, multiple greens, overlaps, right-turn-on-red, non-signalized
intersections, bus and carpool lanes, “bottlenecks,” shared lanes, mid-block
entry flows, protected and/or permitted left turns, user-specified bandwidth
constraints, and desired degree of saturation for movements with actuated
control. Other applications of the tool include evaluation and simulation of
“grouped intersections” (such as diamond intersections and closely-spaced
intersections operating from one controller) and sign-controlled intersections.
Of course, this power and flexibility comes with a price. This is by far the
most complex program to set up and use. It is also the most expensive, and
probably not the best selection for developing signal timing plans with a
minimum budget.
Installation and Evaluation (Field Adjustments)
Once the hardware is determined to be operating correctly, the last task is to
evaluate how well the new signal settings are managing traffic demand. Often, a
simple adjustment of one parameter is all that is necessary. It may be possible to
accommodate longer queues on the main street, for example, by simply advancing
the offset by several seconds. Other timing problems can be resolved by simple
adjustments to the minimum green or vehicle extension parameters. These types of
issues are resolved by a positive output from the “Field Adjustment” decision in
Figure 1. In most jurisdictions, the entire sequence, from determining the type of
problem, to making the adjustments, to evaluating the results, and to recording the
changes, is a manual process that relies on the experience of a signal engineer (or
signal technician) to provide a solution. Obviously, the quality of the solution is a
function of the experience and dedication of the person performing the work.
Report Structure
In addition to this introductory section, the report has five sections. Section II defines the
eight steps that are common to any signal retiming effort, whether it is for one signal or for
a system of hundreds of signals. When reviewing these steps, it is important to recognize
that they exist whether or not they require any resources with the current effort.
This report provides a number of “rules of thumb” and methods that may be used to
estimate various values that are used in the signal timing process. We caution the user to
follow suggestions when appropriate, but to be aware that it is always desirable to verify
these estimates with field observations when possible.
Section III provides a “tool box” of resources for the Practitioner. These resources will aid
the user in collecting and managing data and in better understanding the physical
7
constraints involved with signal timing, and will explain back-of-the-envelope techniques
that may be used when cost constraints prohibit more traditional solutions.
Signal settings can be categorized as local controller parameters or coordination
parameters. The local controller parameters include phase minimums, extension times,
and change and clearance intervals. Coordination parameters are the cycle length, split
and offset. Section IV presents the local controller parameters, and Section V discusses the
coordination issues. Finally, Section VI provides three examples of how these techniques
can be applied. One scenario involves an agency that has funds for signal timing but does
not have enough resources to complete the classical method. The second scenario
illustrates how an agency can develop signal settings with a modest budget, and the third
scenario illustrates what an agency can do with virtually no budget for signal timing other
than the part-time effort from existing staff.
8

II. Signal Timing Process
There are eight distinct steps that define the signal timing development process. Not every
step requires a costly effort to complete in every instance. For example, it is not difficult to
determine the signal grouping for an arterial with three signals. However, it may be a
more difficult task to identify signal groupings for 50 intersections in arterial and grid
networks. The steps begin with identifying the system boundaries. This boundary helps to
minimize the scope-creep temptation of adding just one more intersection. From here, the
steps are a logical and straightforward process that will enable the practitioners to
efficiently acquire only the essential information. This methodical procedure will enable
practitioners to avoid one of the most costly endeavors—making a second or third trip to the
field to obtain more data or data that was missed this first time.
1 – Identify the System Intersections
Although this step is obvious, it is a necessary first step. The intent is to clearly identify all
intersections that will be analyzed in the effort. This is an important issue because all
intersections will require a baseline amount of attention at the start of the effort. This
effort translates to a cost that we want to minimize.
Each intersection must be identified by a unique name and number. The numbering
scheme should be organized in a way that reflects the geometry of the intersections. For
example, if the intersections are on an arterial that generally runs east and west, the
numbers might start with the lowest number for the western most intersection and
increase to the east. Other basic information should be defined at this time including
whether the intersection is currently signalized, political jurisdiction, responsible
maintenance organization, and any other general, readily-available information or
characteristic. This information should be entered into a spreadsheet.
It is important to recognize at this point that this listing is all of the intersections that are
under consideration. This does not imply that all of these intersections will necessarily
operate together as a group or system; it simply means that these intersections will be
considered and evaluated. Some or all may operate together as a single group, two or more
may operate as separate groups, or one or more intersections may operate better as isolated
intersections. These solutions can only be evaluated after an operational analysis.
2 – Collect and Organize Existing Data
The data needed to prepare signal timing plans can be divided into two categories:
descriptive and demand. The descriptive data is the easiest to obtain, and, for the most
part, can be obtained from the files of the operating agency. These data include the
following:
• A condition diagram of each intersection showing the number of lanes and width of
each lane on all approaches. The condition diagram must have a North arrow and
show the street names.
• A phasing diagram for intersections with existing controllers. It is important for the
phasing diagram to include the NEMA phase number for each phase movement.
The phasing diagram must also show all overlaps (if any).
9
• Existing detector location, type (presence or passage), and phase assignment
information. These data are necessary to determine the phase interval settings such
as the minimum green and the extension.
• Existing traffic count data. The most useful data are turning movement counts.
When using old counts, it is necessary to determine whether there has been any
major change in the traffic demand since the count was made. If there has been no
significant change in demand, then the counts can be adjusted for annual traffic
growth. If there has been a major change, then the counts may not be as useful.
Hourly road tube counts and even average annual daily traffic 24-hour counts are
also useful information and can be used to estimate traffic growth and even turning
movement counts. This information may be available from the local jurisdiction, the
local or regional planning agencies, and/or the state department of transportation.
Because manual counting is the single most expensive element to signal timing,
assimilating existing data is usually well worth the effort and cost.
• Distance between intersections and the free-flow travel speed for the conditions
under which the timing plan will operate. This information should be depicted on a
map of the area showing the roads and signalized intersections. It is not necessary
for the map to be drawn to scale; however, it is important for each link on the map to
be long enough to be able to show various data such as link length, speeds, and
volume.
• An estimate of the number of different timing plans that may be needed and the
times during which each plan would be used. This information must be determined
based on the available traffic count data and the experience of the practitioner.
3 – Conduct Site Survey
This step may be the most important step in the process. Although it is possible to
generate both local and coordinated signal timing parameters without ever seeing the
intersection, this is a very dubious practice. Physical constraints that may or may not be
noted on a plan sheet, but that may have an obvious impact on traffic flow, are immediately
obvious to the viewer. Vegetation sight distance obstructions, adverse approach grades and
curvature, and fading pavement markings are examples of factors that affect traffic flow
that are apparent during a site survey.
The site survey is most effective when conducted after all of the existing data has been
collected and organized. The purpose of the site visit is to confirm that the existing
information gathered in the previous step is accurate and to collect any additional data that
may be needed.
It is strongly recommended that each intersection be visited during the hours for which the
timing plan is being developed. For example, if four timing plans are being developed, then
the intersection should be visited during the peak AM period, during a typical day period,
during the peak PM period, and during a low-volume night period. Most of the information
will be obtained during the typical day period, but site visits during the extreme conditions
of both high and low volume will frequently provide insight into signal operation that
cannot be obtained any other way.
10

The basic intersection checklist includes the following:
• Condition Diagram – This may be a verification of the intersection sketch
obtained during the previous step, or if there is no existing drawing, preparation of a
new diagram. This diagram should include the following:
o Intersection sketch showing driveway curb cuts, sidewalks, crosswalks, North
arrow, street names
o Approach lane configurations including widths and movement assignments
o Sight distance restrictions and cause such as vertical or horizontal curvature
and vegetation
o Curb restrictions (e.g., parking, loading zone, transit stop, etc.).
• Phasing Diagram – Like the Condition Diagram, this diagram is either a
verification of existing information or the preparation of a new document. It is
important for the phasing diagram to include the NEMA phase number for each
phase movement and to identify the NEMA phase number with the corresponding
traffic movement by direction (see Figure 2). For example, Eastbound Left Turn –
Phase 5; Eastbound Through – Phase 2. The phasing diagram must also show and
identify all overlaps (if any).
Session 4 NHI 133028 Traffic Control Signalization and
Software
11
1
5
2
6
3 4
7 8
8
6
4
5
3
1
7
2
Main Street Side Street
Barrier
Figure 2. Standard 8-Phase Intersection, Layout.
• Detector Locations – Existing detector location, type (presence or passage), and
phase assignment data are necessary to determine the phase interval settings. The
purpose of the field visit is to verify that the detectors are deployed as shown on
existing documents; but more importantly, the purpose is to verify that the detectors
are operating as designed.
• Existing Controller Settings – With modern controllers, it is not unusual to find
three distinctly different sets of local controller timing data: the data in the
controller itself, the data shown on intersection records in the controller cabinet, and
controller data from the office records. Of course, the purpose of the site visit is to
reconcile any differences among these record sets and to verify that the settings are
reasonable for the traffic conditions.
• Traffic Flow Observations – While visiting each intersection, record the typical
free-flow speed observed on each link and note this information on the map prepared
in the previous step. Notice that the speeds may be different for each timing plan.
This observation is important because it will have a major impact on the offset. It is
11

also practical to determine the link length using the vehicle’s odometer to verify the
information recorded on the map. This independent verification of link length could
save a great deal of work that would be required if the distance recorded on the map
were wrong.
For this minimum cost approach to signal timing to be effective, it is vitally important to
make full use of all existing information. At this point in the process, the practitioner will
be able to observe the operation of the intersection during the time period of interest with
full knowledge of the existing parameters and detector operation. While it would be
valuable to be able to use an analytical tool to evaluate intersection performance, the low-
budget approach cannot support this luxury. Instead, the observations and experience of
the practitioner are substituted.
4 – Obtain Turning Movement Data
This step involves the preparation of turning movement data for each primary intersection
for each timing plan to be developed. The following options are available to the
practitioners to acquire these data, listed in descending order of expected accuracy:
1. Conduct a new turning movement count for the period in question.
2. Conduct a “Short Count” using the procedures discussed in the following section.
3. At an intersection where there has been no significant construction or development,
update an old turning movement count to reflect general traffic trends.
4. Estimate turning movement data using the methods discussed in the following
section that are based on NCHRP 255, “Highway Traffic Data for Urbanized Area
Project Planning and Design.” This effort may be performed using the program
TurnsW, which estimates turning volumes from existing link volumes.
2
5 – Calculate Local Timing Parameters
As previously noted, it is not unusual to find conflicting information concerning controller
parameters among the various record sets in the office and in the field. It is assumed that
the field observations have identified a situation whereby the local controller settings
require a revision to improve the intersection performance. This step represents the work
necessary to revise existing local controller operation parameters.
The local operation parameters are settings such as phase minimums, maximums, change,
and clearance intervals. These settings are primarily a function of traffic demand, the
geometric design of the intersection, and the type and location of detectors.
6 – Identify Signal Groupings
At this point in the signal timing process, all of the intersections should be operating
efficiently as isolated intersections. In other words, each intersection should be processing
the local demand. Of course, operating efficiently as an isolated intersection and operating
efficiently as a system are two entirely different situations.
2
“TurnsW” is a computer program developed by Dowling and Associates.
12
The purpose of this step is to identify groups of signalized intersections that should operate
together as a coordinated unit. One constraint of grouping signals is that all controllers in
a group must operate on the same cycle length. It is likely that the cycle length
requirements for different intersections are not always identical. A trade-off of coordinated
operation is that some of the intersections in a group will operate at an inefficient cycle
length. This negative must be more than offset by the benefits derived from coordinated
operation.
7 – Calculate Coordination Parameters
In contrast to the local operation parameters, which can number over one hundred when
the parameters for each phase are counted, the number of coordination parameters is
limited to cycle length, offset, and split (phase force-off). There is one combination of these
parameters for each timing plan.
To develop these parameters, the practitioner is faced with two basic options: to use a
computer model such as PASSER™ or Synchro, or to use the manual methods. It is
important for the traffic signal engineer to know the manual methods because they provide
the means to conduct independent checks of the computer models. For all practical
purposes, however, most signal timing is done with computer optimization models.
The minimum cost approach assumes that some model input parameters may be estimated.
It is important to note that it is always better to measure or observe the parameter.
Fortunately, most programs provide a method to lock some timing parameters while
allowing the software to optimize others. For example, at minor intersections, the
durations of the minor phases (left turn and side street movements) may be determined
manually and then input into the model.
When a computer model is available, it is advisable to use the program for several reasons:
1. Much of the input required for both manual and computerized methods is associated
with the description of the network. This includes parameters like signal phasing,
link distances and speeds, and intersection geometrics. With a computerized
approach, this information can be readily leveraged into generating new timing
plans with relatively few changes in the input.
2. The data structure of the model will ensure that key information is not overlooked.
3. The data files provide documentation for both the input and the output.
8 – Install and Evaluate New Plans
The final step in the process is to install and evaluate the new timing plans in the field.
There are two basic analytical procedures available to the engineer to evaluate new timing
plans: stopped-time delay studies and moving car travel time studies. With a shoestring
budget, it is unlikely that either of these techniques can be employed. Because the
shoestring budget approach has skipped many steps that normally provide checks and
balances, we recommend that the engineer use special care when using these plans for the
first time. Specifically, we recommend the following:
1. Install the signal timing parameters in each controller.
13
2. During a benign traffic period, such as mid-morning after the AM rush hour, put the
plan in operation and observe that the offsets are as expected. Check the operation
at every intersection.
3. Place the plan in operation during the period for which it was developed. Again,
observe the offsets at each intersection. During peak periods, check left turn bays
for spill-back. Make minor adjustments as necessary.
This effort should not be minimized; the practitioner should expect to spend 20 to 30
percent of the timing budget on this evaluation and “fine-tuning” effort.
14

III. Signal Timing Tool Box
When most traffic engineers consider signal timing, the first thought invariably involves
the computerized optimization models. Issues like which model is best, and what are the
minimum data required to use the model, are typical topics. Over the years, much research
effort has been invested in developing these models, and of all of the steps in the signal
timing process, the evolution of the signal timing optimization models is the most highly
developed.
When one mentions the word “model,” most automatically think of a computer model. But
it is important to recognize that a model can also be a manual model.
The following sections provide a description of various manual and automated techniques
that can be used to develop timing plans. These techniques can be used to estimate
parameters directly, or to estimate various inputs to signal timing optimization computer
programs that will be used to generate timing plans. The basic concept underlying the
approach to minimizing timing plan development cost is to identify those parts of the
process when resources should be directed to achieve the best benefit, and conversely,
identify areas where parameters can be approximated.
Data Collection Tools
Regardless of what computer model or manual process the engineer chooses to use to
develop the timing plans, all require network descriptive information and turning
movement data. All signal optimization and simulation models, even manual signal timing
procedures, require a physical description of the network. This description includes
distance between intersections (link length); the number and type of lanes; lane width,
length, and grade; permitted traffic movements from each lane; and the traffic signal phase
that services each flow. Building a network from scratch is a significant undertaking. But
once the network is defined, in general, only traffic demand and signal timing parameters
have to be updated to test a new scenario. The tools related to data collection are provided
below.
Intersection Categorization
The intersection may be categorized as either primary or secondary. The primary
intersections are the ones that have the highest demand to capacity ratio and will,
therefore, require the longest cycles. These intersections are usually well known to
the traffic engineer. They are the intersection of two arterials, the intersections
with the worst accident experience, the intersections that service the major shopping
centers, and the intersections that generate the most complaints. The secondary
intersections are the ones that generally serve the adjacent residential areas and
local commercial areas. They are usually characterized by heavy demand on the two
major approaches and much less demand on the cross-street approaches.
The purpose of assigning intersections to one of these two categories is to reduce the
locations where traffic counts are required. The primary intersections require
turning movement traffic counts—there is simply no other way to measure demand.
However, the secondary intersections usually have side street demand that can be
met with phase minimum green times (usually between 8 and 15 seconds with lower
15

values if presence detection is provided near the stop bar). The strategy, therefore,
is to concentrate the counting resources at the locations where there is no substitute,
and to use minimum green times for the minor phases at secondary intersections.
This categorization is important because more and costly data is needed for the
primary intersections than for the secondary intersections. Many of the timing
parameters for the secondary intersections will be estimated rather than calculated,
and therefore, are subject to larger errors.
This characterization is very subjective, and to a great extent, the categorization
depends on the budget available for signal timing. If the budget is small, fewer
intersections would be considered primary; if the budget is moderate, more
intersections on the cusp would be considered primary.
Short-Count Method
Regardless of whether manual or computerized signal timing models are planned to
be used, there is a need for turning movement count input to the process. The
turning movement count is the single most costly element in the signal timing
process, and therefore, is generally the most significant impediment to overcome.
One way to reduce the expense of data collection is to reduce the time required to
collect the data. Many traffic engineers use “short counts” to meet this objective.
Short counts are normal turning movement counts that are conducted over periods
that are less than normal.
The basic concept of the short count is to take a sample of the turning movements
during the period of interest and to expand the short period to reflect an estimate of
the demand during the entire period. Fifteen-minute samples are typical, and they
are expanded to hourly flow rates for use in the various signal timing procedures.
One method of developing these counts, the Maximum Likehood model, was defined
by Maher in 1984.
3
If the agency does not have a procedure in place for conducting short counts, the
following is suggested:
1. Determine the beginning and ending time of the period for which the count is
intended to represent
2. Within this time window identified above, start a stop watch when the yellow
ends for the through movement on the approach being observed
3. Record the number of vehicles turning left, through, and right during the cycle
measured from the end of yellow to the end of yellow during each cycle
4. Continue recording the counts at the end of each cycle until at least 15 minutes
have elapsed and at least eight cycles are recorded
5. For the last cycle, add the number of vehicles in queue (if any) to the count for
the last cycle
6. Record the time on the stop watch (10 minutes or more)
3
Maher, M.J. “Estimating the Turning Flows at a Junction: A Comparison of Three Models,” Traffic
Engineering and Control 25 (11), pages 19-22.
16

7. Convert the counts to an hourly flow rate for each movement.
Estimated Turning Movements
When turning movement counts are not available, it is sometimes possible to
estimate the turning movements when approach and departure volumes are known
and some information is available concerning the intersection flows.
The National Cooperative Highway Research Program (NCHRP) developed
techniques for estimating traffic demand and turning movements. These techniques
are described in NCHRP 255, “Highway Traffic Data for Urbanized Area Project
Planning and Design.” One of the procedures described in this document derives
turning movements using an iterative approach, which alternately balances the
inflows and outflows until the results converge (up to a user-specified maximum
number of row and column iterations).
Dowling Associates, Inc., a traffic engineering and transportation planning
consulting firm based in Oakland, California developed a program, TurnsW, that
can be used to estimate turning volumes given approach and departure volumes.
This program is available from
http://www.dowlinginc.com/ (under downloads). The
user may “lock in” pre-determined volumes for one or more of the estimated turning
movements. The program will then compute the remaining turning volumes based
upon these restrictions.
Signal Grouping
To state the obvious, all signals that are synchronized together must operate on the same
cycle length or a multiple of that cycle length. Since it is unlikely that all primary
intersections will have the same cycle length requirements, some method must be used to
arrive at a common cycle length. Engineering judgment usually prevails in this area. For
example, if there are three intersections requiring 75-, 80-, and 110-second cycles, the 110-
second cycle must be used. However, if the results were 80, 80, and 85, then an 80-second
may be appropriate. In general, the longest cycle length would be used.
Another important point to make regarding the grouping of intersections is that the need to
group the intersections is based on traffic demand. Since it is likely that traffic demand is
different during different times of the day, it is reasonable to expect that different
groupings of intersections may be appropriate during different times of the day. In
practice, this may mean, for example, that an intersection is associated with a group and
operates with the common group cycle length during a peak period, but operates as an
isolated intersection during other time periods. It is important to recognize that
intersection groupings are a function of traffic demand, and signal groupings are not a
static condition.
Coupling Index
The Coupling Index is a simple methodology to determine the potential benefit of
coordinating the operation of two signalized intersections. The theory is based on
Newton’s law of gravitation, which states that the attraction between two bodies is
proportional to the size of the two bodies (traffic volume) and inversely proportional
to the distance squared. In equation form, the Coupling Index is:
17

CI = V / D
2
Where:
CI = Coupling Index
V = 2-way total traffic volume peak hour / (1000 vph)
D = Distance between signals (miles)
There are several variations of this approach. The “Linking Factor” as used by Computran
in Winston Salem, NC, and the “Offset Benefit” as described in NCHRP Report 3-18 (3) are
two examples of different similar techniques that have been used to determine signal group
boundaries.
A recent review and analysis of these grouping methods by Hook and Albers concluded that
there is no absolute best method to use for determining where system breaks should occur
4
.
The authors further concluded that each method gives about the same result, and the
simpler methods are just as valid as the complicated methods. In general, they suggested
that the following criteria be used:
1. Group all intersections that are within 2,500 feet of one another.
2. Use all links that are 5,000 feet or more in length as boundary links.
3. Calculate the Coupling Index for all links between 2,500 feet and 5,000 feet in
length and link all intersections that have a value greater than 50, consider linking
intersections that have a value of 1 to 50, and do not link intersections that have a
value of less than 1.
The following process is suggested for use with any of the Index procedures. The
first step is to determine which sections of roadways are to be analyzed. These links
are then drawn on a map, which may be distorted to provide space to display
information related to each link.
Various traffic data can be superimposed over the roadway network to determine
applicable traffic volumes for the particular segment being registered. Some links
may not have any corresponding traffic data. In which case, the segment is still
registered, but with a zero value given for the traffic volume, which in turn results
in a Coupling Index of zero.
The next step is to calculate the indices for all of the registered links. The final step
is to identify signal groups by linking together intersections with high index values
and identifying group boundaries using links with low index values.
4
“Comparison of Alternative Methodologies to Determine Breakpoints in Signal Progression,” TRB
Paper by David Hook and Allen Albers, 2002.
18
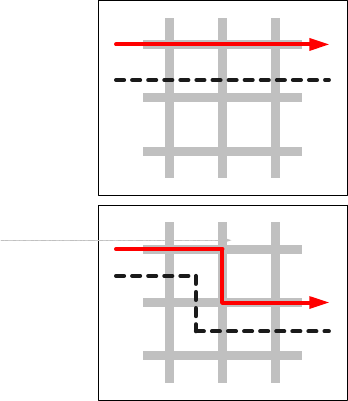
Major Traffic Flows
Another factor that should be considered when considering intersection groupings is
traffic-flow demand paths. With an arterial, this issue is moot, but with a grid
network, it can be crucial. With the grid pattern shown in the top chart in Figure 3,
the horizontal dashed line shows a likely group boundary. However, when a major
traffic-flow pattern does a dogleg, as shown in the bottom chart of Figure 3, then a
different group boundary may be appropriate. This characteristic will probably
manifest itself in the index, but when the signal engineer must make decisions
based on sparse data, then knowledge of traffic-flow patterns can be a useful
discriminator to identify group boundaries.
Figure 3. Grid Pattern.
Coordinatability Factor
There is one additional technique than can be employed by those that use the
computer program, Synchro. Synchro has an internal methodology to calculate a
“coordinatability factor.” This factor considers travel time, volume, distance, vehicle
platoons, vehicle queuing, and natural cycle lengths. The coordinatability factor is
similar to the “strength of attraction,” but also considers the natural cycle length
and vehicle queuing. The natural cycle length is defined as the cycle at which the
intersection would run in an isolated mode or the minimum delay cycle length. The
potential for vehicle queues exceeding the available storage is also considered in
determining the desirability of coordination.
Number of Timing Plans
The “rule of thumb” for the number of signal timing plans is that each group requires a
minimum of four plans: morning peak plan, average day plan, afternoon peak plan, and
evening plan. But each signal group is unique, and each group has unique demands. For
example, an arterial that provides access to a regional shopping center may experience
major demands on Saturday. Other examples abound of locations that require different
timing plans to meet demands by other major traffic generators, such as amusement parks,
recreational demands, and other non-work-related trips.
19

One analytical method that can be used to estimate the need for a special timing plan is to
plot the arterial traffic by direction and by time of day. The plot of the sum of both
directions provides an indication when cycle length changes may be required. Longer cycles
are typically required to service heavier volumes. The ratio of one direction to the total
traffic by time of day provides a good indication when offset changes may be required. The
number of plans required and the time during which they will be used is needed to schedule
the site surveys described in the next section. Analysis of the traffic demands at individual
intersections will indicate when split changes are required.
Cycle Length Issues
As noted above, having a common cycle length is fundamental to coordinated signal
operation. The cycle length must be evaluated from two different perspectives: individual
intersection and the group cycle length.
For the individual intersection, the recommended approach is to focus on the one or two
major intersections in the group—the intersections with the highest demand because these
are the ones that will set the minimum cycle length limits. When evaluating cycle lengths,
it is important to verify that the pedestrian timing is sufficient to allow pedestrians to cross
the street. When the pedestrian timing is known, say 7 seconds to Walk, 10 seconds for
pedestrian clearance, and 3 seconds for yellow change, and the vehicle phase is to be
allocated at least 25 percent of the cycle, then the minimum cycle length that can meet both
constraints is 20 seconds divided by 25 percent, or 80 seconds (assuming two critical
phases).
In general, the intersection in the group that requires the longest cycle length will set the
group cycle length. The cycle length and splits can be determined by using either Webster’s
equation or the Greenshields-Poisson Method. Both of these methods are explained below.
In general, for a given demand condition, there is a cycle length that will provide the
optimum two-way progression. This cycle length is a function of the speed of the traffic on
the links between intersections and the link distance between intersections. This cycle
length is called the “Resonant Cycle,” and is explained further below.
Webster’s Equation
One approach to determining cycle lengths for an isolated, pre-timed location is
based on Webster's equation for minimum delay cycle lengths. The equation is as
follows:
Cycle Length = (1.5 * L + 5) / (1.0 - Y
i
)
Where:
L = The lost time per cycle in seconds.
Y
i
= Sum of the degree of saturation for all critical phases.
5
This method was developed by F. V. Webster of England’s Road Research
Laboratory in the 1960s. The research supporting this equation is based on
5
The critical phases are the ones that require the most green time. The flow ratio is calculated by
dividing the volume by the saturation flow rate for that movement.
20

measuring delay at a large number of intersections with different geometric designs
and cycle lengths. These observations yielded the equation that is used today. It is
important to recognize that this work assumed random arrivals and fixed-time
operation—two conditions that can rarely be met in the United States. Notice that
the equation becomes unstable at high levels of saturation and should not be used at
locations where demand approaches capacity. Nevertheless, this technique provides
a starting point when developing signal timings. To use this equation:
1. Estimate the lost time per cycle by multiplying the number of critical phases
per cycle (2, 3, or 4) by 5 seconds (estimated yellow change plus red clearance
time) to determine the “L” factor. L will have a value of 10, 15, or 20, and
the numerator will equate to 20, 27.5, or 35 seconds.
2. Estimate the degree of saturation for each critical phase by dividing the
demand by the saturation flow (normally 1,900 vehicles per hour per lane).
3. Sum the degree of saturation for each critical phase and subtract the sum
from 1.0. This is the denominator.
4. To obtain the cycle length, round the division to the next highest five
seconds.
Greenshields-Poisson Method
This approach to signal timing is statistically-based and makes several assumptions
about the behavior of traffic. It uses the Poisson distribution to describe the arrival
patterns of vehicles at an intersection. This distribution assumes that the vehicles
travel randomly. This assumption is frequently a problem in urban areas, but like
other methods, it can provide a good starting point to develop signal settings.
While the Poisson distribution is used to estimate the arrivals, the time required for
the approach discharge is based on work done by B. D. Greenshields in 1947.
Surprisingly, this work has held up well during the intervening 50 years. Like
Webster, Greenshields founded his work on many observations of traffic
performance. The results of these studies are summed in the equation:
Phase Time = 3.8 + 2.1 * n
Where:
Phase Time is the required duration to service the queue.
n is the number of vehicles in queue in the critical lane.
6
The basic procedure is iterative and uses the following steps:
1. Assume a cycle length. For two critical phases, we suggest 60 seconds; for
three critical phases, we suggest 75 seconds; and for four critical phases, we
suggest 100 seconds.
a. Calculate the number of cycles per hour by dividing 3,600 (seconds per hour)
by the assumed cycle length.
6
The critical lane or movement for each phase is the lane that requires the most green time.
21

2. For each critical phase, divide the demand volume by the number of lanes
and by the number of cycles per hour to determine the mean arrival rate per
lane.
3. Use the Poisson distribution (Table 1) to convert the mean arrival rate to the
maximum expected arrivals at the 95 percentile level.
4. Convert this maximum expected arrivals to time required using Greenshields
equation.
5. Add the time required for each critical phase plus the clearance and change
time required (nominally 5 seconds) for each critical phase. If the sum is
more than 5 seconds less than the assumed cycle, repeat the steps starting
with the new (shorter) cycle length. If the sum is greater than the assumed
cycle length by more than 5 seconds, repeat the steps but use the 90
th
or 85
th
percentile maximum expected arrivals. If the calculations using the 85
th
percentile arrivals indicate a cycle length greater than 80 seconds for two-
phase operation, 100 seconds for three critical phases and 120 seconds for
four critical phases, then the volumes may be too high to use this method.
Table 1. Poisson Distribution.
Mean Arrival Rate 85 Percentile 90 Percentile 95 Percentile
1 3 3 3
2 4 4 5
3 5 6 7
4 7 7 8
5 8 8 9
6 9 10 11
7 10 11 12
8 11 12 13
9 13 13 15
10 14 15 16
11 16 16 17
12 16 17 18
13 17 18 20
14 18 19 21
15 19 20 22
16 21 22 23
17 22 23 24
18 23 24 26
19 24 25 27
20 25 26 28
The Greenshields-Poisson Method is best suited to lower volume intersections.
When the critical lane volume exceeds 400 vph, then the basic assumption of
random arrivals (no vehicle interactions) is probably not valid. Even within this
range, care must be exercised. The method is designed to accommodate more
vehicles than is expected on average; but some percentage of the time, 5 to 15
percent, the demand will exceed the time allocated and not all arrivals will be
22

served. Care should be used to not apply this method at congested locations as the
process will suggest unrealistically long cycle lengths, which will result in high delay
and long queues.
Cycle Length
When the traffic demand is balanced in both directions on the arterial, and when
the distance between the intersections is approximately equal, then it is possible to
obtain good progression in both directions by adjusting the cycle length using the
following formulas:
(1) Cycle = 2 * Distance / Speed (1)
(2) Cycle = 4 * Distance / Speed (2)
(3) Cycle = 6 * Distance / Speed (3)
Where:
Cycle is the cycle length in seconds.
Distance is the link length in feet.
Speed is the average link speed in feet per second.
These equations define resonant cycle lengths for this signal group.
7
Notice that the
only real-time variable in the equations is traffic speed, which is actually used to
estimate link travel time. This implies that different cycle lengths would be
appropriate when there is a significant change in the link speed. It is typical for
link speeds to be slower during the peak periods. This implies that it may be
appropriate to use a longer cycle length during peak periods.
Once an appropriate cycle length is selected using one of the three formulas noted
above, the offsets can be identified as follows:
Formula (1) – The offset of an intersection at one end of the arterial is set to an
arbitrary value—many engineers use 0 seconds. The offset at the next intersection
is set to the sum of the value of the offset at the first intersection plus 50 percent of
the cycle. For example, if the offset of the first intersection is 0 and the cycle length
is 100 seconds, then the offset of the second intersection is 50 seconds. The offset of
the third intersection and all other odd-numbered intersections is the same as the
offset at the first intersection, 0 seconds in the example. The offset at the fourth
intersection and all other even-numbered intersections is the same as the offset at
the second intersection, 50 seconds in the example. This method of setting signal
timing is called a Single Alternate, and is the most desirable because it provides the
maximum bandwidth in both directions.
Formula (2) – The offset of two intersections at one end of the arterial are set to an
arbitrary value—0 seconds, for example. The offset at the next two intersections are
set to the sum of the value of the offset at the first intersection plus 50 percent of
7
“Resonant Cycles in Traffic Signal Control,” Shelby, S.G., Darcy Bullock, and Douglas Gettman,
TRB Meeting, January 2005.
23
the cycle. For example, if the offset of the first and second intersection is 0 and the
cycle length is 100 seconds, then the offset of the third and fourth intersections is 50
seconds. The offset of the fifth and sixth intersections is the same as the offset at
the first and second intersection, 0 seconds in the example. The offset at the
seventh and eighth intersection is the same as the offset at the third and fourth
intersections, 50 seconds in the example. The offsets at additional intersections are
in a similar manner. This method of setting signal timing is called a Double
Alternate, and is useful when the intersections are spaced more closely. It provides
bandwidths half that provided by the Single Alternate solution.
Formula (3) – The offsets at three intersections at one end of the arterial are set to
an arbitrary value—for example, 0 seconds. The offset at the next three
intersections are set to the sum of the value of the offset at the first intersection plus
50 percent of the cycle. For example, if the offset of the first, second, and third
intersection is 0 and the cycle length is 100 seconds, then the offset of the fourth,
fifth, and sixth intersections is 50 seconds. The offset of the seventh, eighth, and
ninth intersection is the same as the offset at the first, second, and third
intersection, 0 seconds in the example. The offsets at additional intersections are
set in a similar manner in groups of three. This method of setting signal timing is
called a Triple Alternate. This is appropriate for closely spaced intersections and
provides a bandwidth one-third that of the Single Alternate.
The important point to recognize when testing various Resonant Cycle lengths is
that the speed of traffic is set based on what the average driver considers
reasonable, not on an arbitrary speed that provides the maximum bandwidth. It is
a common error to put a timing plan in the field that looks great on paper, but does
not work in the field because the vehicles are traveling faster (or slower) than the
assumptions. Another related issue is that the average speed is not necessarily
consistent throughout the day. It may be lower during the peak periods or at night,
for example. Small errors in speed estimates can result in very poor signal timing
(large offset errors), especially on suburban arterials where the distances between
intersections are large. For example, estimating a speed of 30 mph when in fact the
true speed is 35 mph will result in an offset error of 13 seconds on a 4,000-foot link.
Offset Issues
The offset is the heart of coordination signal timing. It is the difference in time from a
reference point in the cycle at the upstream intersection to the same point in the cycle at
the downstream intersection. This reference point is usually taken to be the beginning of
the main street green. The simplest offset to consider is the one-way offset. When the light
turns green at the upstream intersection and the platoon travels down the link, it is
desirable for the downstream controller to change to green when the platoon approaches.
This offset is appropriate for one-way streets and for situations when heavy demand in one
direction justifies ignoring counter-flowing traffic.
Notice that this explanation deals with one link between intersections. Except at the ends
of an arterial, the intersections on an arterial have one intersection upstream and another
intersection downstream. It is important to recognize that changing the offset timing at
one intersection affects the relative offset on four links. This is illustrated in Figure 4.
24

Offset
Figure 4. Offset Change Impacts.
In this example, the offset of the middle intersection is adjusted downward (earlier). Notice
that this impacts the right-bound traffic flowing to the right intersection, as well as the two
links of left-bound traffic.
There is always a temptation to adjust the offset at one intersection to accommodate
demand in one direction on one link without taking into account the effects of this change
on the other three links. One way to manually analyze the offset impacts is to use the Kell
Method described below.
One-Way Offset
For the predominant one-way flow situation, the expedient approach requires only
an estimate of the median travel time between intersections. The offset, expressed
in seconds, is set at the intersections farthest upstream to an arbitrary value—many
engineers use 0 seconds. The offset at the nearest downstream intersection is
determined by adding the travel time to the offset of the adjacent upstream
intersection. The travel time is estimated by dividing distance between the
intersections by the average speed on the link. This process continues until the
offsets of all intersections in the group have been determined.
Notice that this method of determining offsets is independent of the splits at each
intersection and the cycle length.
As a further refinement, many traffic engineers will provide sufficient time for any
standing queue to discharge before the arriving platoon. To do this, estimate the
total number of vehicles in queue (vehicles that arrive during the red and do not
turn right). Divide this number by the number of lanes, and multiply the result by
2.5 seconds. Subtract this total from the offset that was determined by the link
travel time. Adjusting for the average standing queue is referred to as the “Smooth
Flow Offset.” As with the basic offset calculation method, when adjusting for the
standing queues, start at the upstream intersection and work downstream
calculating each offset based on the upstream offset by adding the travel time and
subtracting the queue discharge time to the upstream offset at each intersection.
25

Two-Way Offsets (Kell Method)
The Kell Method is a technique that can be used to manually construct a time-space
diagram that results in balanced offsets in both directions. This technique is named
after its developer; Mr. James H. Kell, who was an instructor at University of
California, Berkley. The process is straightforward and requires a minimum input
of information. An estimate of the percent green for the main street for each
intersection, the average speed on the arterial, and the distance between
intersections are the only information required to use the technique. The products
of the method are the cycle length for the arterial and the offset for each intersection
that provides equal bandwidth in each direction. The process is as follows:
1. Prepare a scale drawing laying out the intersections along the bottom of the
page.
2. Draw a vertical line at the first intersection on the left.
3. Draw several cycles on the vertical line using a closed rectangle to represent
the percent of time that the signal is not green.
4. Draw a horizontal working line through the middle of either a green or not-
green.
5. Draw a line that slopes upward and to the right at the beginning of green at
the left-most intersection. The sketch would look something like that shown
in Figure 5.
Figure 5. Kell Method (Beginning).
6. Plot the cycle of the next intersection such that either the green or the not-
green (whichever causes the beginning of green to come closest to the sloped
line) is centered on the Working Line, as shown in Figure 6.
26

Figure 6. Kell Method (Continued).
7. Continue plotting the cycle for the remaining intersections by centering
either the green or the red. A completed diagram is shown in Figure 7.
Figure 7. Kell Method (Completed Diagram).
Notice that this technique forces a symmetrical solution that provides two-way
progression with approximately equal bandwidths in each direction. The final
step in the process is to determine the cycle length. In general, traffic will move
on an arterial at a speed that the drivers consider reasonable for the prevailing
conditions. The engineer must estimate this speed and use it to determine the
cycle length. Notice that the diagram shows that a vehicle requires
approximately 1 ½ cycles to travel from intersection “A” to “D” in either
direction. If the prevailing speed on the arterial were 35 mph, then an
appropriate cycle length would be 75 seconds. This is determined by noting that
it requires 1 ½ cycles to travel 5,800 feet, which is equivalent to 3,867 feet per
cycle. The cycle length is determined by dividing the distance (3,867 feet) by the
speed, 51.33 feet per second (35 mph), and the cycle is 75 seconds.
27

Split Issues
The split is the amount of time allocated to each phase in a cycle at each intersection. The
toolbox offers two ways to calculate splits manually, the Greenshields-Poisson method
previously described and the Critical Movement method that is described below.
Critical Movement Method
This method uses techniques that were employed in the 1984 Highway Capacity
Manual as a “Planning Analysis” (Figure 8) to estimate intersection capacity. We
have adapted elements of this analysis to use to develop traffic signal timing
parameters. To use this method, intersection turning movements, the signal
phasing, and the cycle length for the intersection must be known. The designer
must determine the effective demand for each phase by applying various adjustment
factors to reduce the demand to passenger car equivalents per lane.
Figure 8. Critical Lane Analysis Example.
For the purposes of preparing traffic signal timing plans, a high level of precision is
not needed. Traffic demand can vary plus or minus 20 percent in just a few minutes
at a given location. Also a variation of 20 percent from day to day is not unusual.
Our objective, therefore, is to develop timing plans that are robust and that will
perform well through a wide range of demand conditions. The following steps are
suggested:
1. If the left turn movement is not protected, multiply the left turn demand by
1.6.
28
2. If the number of trucks is known, multiply the trucks by 1.5.
3. Divide the traffic demand on the four major and left-turn approaches by the
number of lanes for each movement.
4. Determine the critical movements for both the east-west street and the north-
south street. Determine the intersection critical movement by adding these
two together. If this sum is less than 1,500, then continue. If it is over 1,500,
then the intersection is probably over-saturated and the method may not be
applicable.
5. Determine the number of critical movements in each cycle. With no left-turn
protection, there would be two; with left turn protection on one street, there
would be three; and with left turn protection on both streets, there would be
four. Multiply the number of critical movements by five (the lost time), and
subtract this number from the cycle length. This result is an estimate of the
total available seconds of green per cycle that can be used for traffic
movements.
6. The final step is to multiply the total available green time by the ratio of the
critical lane volume for the movement to the total intersection critical lane
volume. For pre-timed operation, this is the phase green time in seconds.
For coordinated operation with actuated controllers, this phase time is used
to set the force-off for the phase. For all actuated phases, the calculated time
is the average green time for the phase. The phase maximum should be set
at 25- to 50-percent greater than this value.
29

IV. Local Controller Parameters
It is useful to identify traffic signal timing parameters as being in one of two categories:
local intersection timing parameters and coordinated operation timing parameters. The
phase minimum or yellow change times are examples of local intersection timing
parameters. The intersection cycle length and offset are examples of coordination timing
parameters. There are far more local intersection timing parameters than coordination
timing parameters. In fact, most systems define only three coordination timing
parameters: cycle length, offset, and split. The following section of this report describes
methods that can be used to set the local intersection timing parameters, while the next
section deals with the coordinated operation parameters.
The basic timing parameters are essentially the same for all actuated controllers. There
are subtle differences between different software implementations; for example, the NEMA
controllers define the force-off function as a “per ring” function, while other
implementations define the force-off function as a “per phase” function. This distinction has
little importance to the traffic engineer who is responsible for developing new traffic signal
plans. These differences, however, are very important when the results of a signal timing
optimization process are implemented in a particular controller. Many newer controllers
automatically calculate the force-off setting once the engineer defines the split.
Because most jurisdictions use NEMA TS-1 and TS-2 or Model 170 actuated controllers, the
primary emphasis has been placed on timing actuated controllers. It is important to
recognize, however, that many jurisdictions use pre-timed controllers. Most of the
principles noted in this section can be directly applied to pre-timed controllers.
For the current status on signal timing, the reader is directed to Signal Timing Practices
and Procedures: State of the Practice (Item IR-116) published by the Institute of
Transportation Engineers (ITE). This report documents the current state-of-the-practice in
traffic signal timing. It was prepared as part of a continuing program developed by FHWA
and ITE to place increased emphasis on the quality of U.S. traffic signal timing.
Actuated Controller Timing Principles
Some of the basic principles of timing the green interval in a traffic actuated controller unit
are as follows:
• Each phase must have a minimum green time so that a stopped vehicle that receives
a green signal has enough time to get started and partially cross the intersection
before the yellow signal appears. This time is sometimes called the initial portion of
the green interval.
• Each vehicle requires enough green time to travel from the detector to the
intersection. This is called passage time, vehicle extension, or gap. Gap refers to
the distance between vehicles as well as the time between vehicles. Each successive
vehicle actuation, therefore, increases the phase green time. With no opposing calls,
the controller rests. Extensions continue to be timed, but with no effect on the green
interval.
• There must be a maximum time that the green interval can be extended if opposing
cars are waiting; this is called the maximum green or extension limit.
30
• Once an actuation is received from an opposing phase, the maximum green timer
begins. The current phase will hold the green until the time between actuations is
greater than the preset unit extension or gap. When a gap is detected, the yellow
change interval will begin and the controller will transition to the next phase in
sequence with demand. This is called termination by gap or gap-out.
• An actuation from another phase received during any portion of the green interval
also starts the maximum green timing circuit. This is also called the extension limit.
Even if actuations are close enough in time to prevent gap termination, the
maximum limit will terminate the green interval when the preset maximum expires.
This is called termination by maximum green or max-out.
Basic Actuated Phase Settings
All actuated controllers support these five basic, phase-timing parameters: minimum
green, extension, maximum green, yellow and red.
Minimum Green (Initial)
The minimum green is the first timed portion of the green interval. The duration of
the minimum green is generally based on the number of vehicles that can be in
queue between the upstream phase detector and the stop line. In general, the phase
duration must be no shorter than some absolute minimum time, such as 5 to 10
seconds. If pedestrians may be crossing with this phase, their crossing time must
also be considered and included in the minimum phase length.
The term, minimum green, is called “minimum initial” on some controllers. There is
a subtle difference. The minimum green defines the duration of the green when
there are no extensions. When the controller uses a minimum initial, the minimum
green duration is equal to the sum of the minimum initial and one extension.
The minimum green time is the minimum assured green that will be displayed. It is
established to allow vehicles that are stopped between the detector on the approach
and the stop line to get started and move into the intersection. Therefore, timing of
this interval depends on the location of the detector and the number of vehicles that
can be stored between the detector and the stop line.
Consideration must also be given to pedestrian timing. When there are no
pedestrian provisions (indications or pushbuttons), the minimum assured green
must be equal to the minimum pedestrian timing (walk + pedestrian clearance).
One method that can be used to calculate the minimum green is:
Minimum Green = 5 + 2n
Where:
“n” is the number of vehicles that can be stored between the stop line
and the far detector in one lane. This is determined by dividing the
distance (in feet) between the stop line and the detector by 25, since 25
is the average vehicle length plus stopped-headway in feet.
When stop-line detection is used, the minimum green can be quite short, say 5 to 10
seconds. These very short minimums can be used on phases where there are no
31
pedestrian movements, and on phases where there are actuated pedestrian signals.
These extremely short minimums should never be used where there is the possibility
of pedestrians crossing with the green display.
Extension (Passage)
The extension (passage) parameter extends the green interval for each vehicle
actuation up to the maximum green. It begins timing when the vehicle actuation is
removed; that is, when the vehicle passes over the detector. This extension period is
subject to termination by the maximum extension timer or a force-off.
The actual passage time parameter (vehicle extension or gap time) is the time that
the phase will be extended for each actuation. This setting is the number of seconds
required for a vehicle moving at the approach speed to travel from the detector to
the stop line. The passage time serves two purposes: (1) it is the passage time from
the detector to the stop line, and (2) it is the allowable time gap between actuations
that will cause the green to remain on that approach. As long as vehicle detections
come at shorter intervals than the passage time (allowable gap), the green will be
retained on that phase until the maximum expires or it is forced-off.
If the passage interval is too short, quick stops may result as well as terminating the
green before the vehicular movement has been adequately served. If the passage
interval is set too long, excessive delays will result as well as safety problems due to
improperly timed last vehicle intervals.
Passage time is calculated as follows:
Passage Time = D / S
Where:
D is the distance from the stop line to the detector in feet.
S is the speed on the approach in feet per second.
Maximum Green
This time setting defines the maximum length of time that a phase can be green in
the presence of a conflicting call. If there is no conflicting call, it will be reset until
an opposing call occurs.
The maximum green timer is normally inhibited during coordinated operation when
the phase maximum time is determined by the phase force-offs. For most actuated
phases, the maximum green should be considered a safety constraint—something to
force the phase to end in the face of continuous demand. There is no accepted
practice to determine the optimum setting. Some engineers feel that all phases
should have similar limits like: 120 seconds for the primary through phases, 90
seconds for the secondary through phases, and 60 seconds for the left-turn phases.
Others set the phase maximums proportional to demand during a critical period.
For example, one could calculate the phase splits using the Critical Movement
method, then set the maximum green at 50-percent higher than the phase splits.
32
Yellow
The yellow interval follows the green interval at the end of each phase. The yellow
interval is also referred to as the “change” interval, and controls the duration of the
yellow display for that phase. The phase change interval timing advises drivers that
their phase has expired and they should: (1) come to a safe stop prior to the stop
line, or (2) proceed through the intersection if they are too near the intersection to
stop.
The following equation is generally used to determine the proper change interval:
Yellow Time = t + S / (2a +- 64.4 g)
Where:
t is the perception/reaction time of the driver in seconds (typically 1.0
second).
S is the speed on the approach in feet per second.
a is the deceleration rate in feet per second (typically taken as 10 feet
per second squared).
g = approach grade, percent of grade divided by 100 (add for up-grade
and subtract for downgrade).
Red
The red clearance interval (also known as the all-red interval) follows the yellow
interval of each phase. It must expire before the next phase in sequence can begin.
It is normally one to two seconds, but on slower speed approaches, it is not unusual
to use a very short duration of 0.0 to 0.5 seconds since the yellow time of 3.0 to 4.0
seconds provides sufficient time to meet both the change and the clearance
requirements.
Red Time = (W + L) / S
Where:
W is the Width of intersection in feet.
L is the length of vehicle in feet (typically taken as 20 feet).
S is the speed on the approach in feet per second.
Pedestrian Parameters
There are two pedestrian timing parameters: Walk and Flashing Don’t Walk (pedestrian
clearance). Where pedestrian movements regularly occur, pedestrians should be provided
with sufficient time to cross the roadway (MUTCD section 4D.03). In other words, unless
the pedestrian movement is actuated, the time required for pedestrians to safely cross the
road (the sum of the Walk and Don’t Walk times) will dictate the minimum green time for
that phase. When pedestrian pushbutton (actuation) is provided, then the normal vehicle
minimums would be used in the absence of a pedestrian actuation. Notice that it is possible
to have a signal design that uses pedestrian pushbutton detection without using pedestrian
Walk and Don’t Walk displays.
33
Walk
The Walk parameter controls the length of time that the walk signal is displayed.
Under normal conditions, the walk interval is 4 to 7 seconds. This allows
pedestrians to have adequate opportunity to leave the curb before the clearance
interval is shown. Under special circumstances, such as at a school crossing with
numerous pedestrians, walk times may exceed 7 seconds. Research indicated that
pedestrian queues of 24 or more people can be accommodated in 7 seconds.
Flashing Don’t Walk
The pedestrian clearance parameter controls the duration that the Flashing Don’t
Walk is displayed. This is the time required for a pedestrian crossing in the
crosswalk to leave the curb and travel out of the traveled way (MUTCD section
4E.02) before opposing vehicles receive a green indication.
The Flashing Don’t Walk (pedestrian clearance) is calculated as follows:
Flashing Don’t Walk = W / S
P
Where:
W is the walking (crossing) distance in feet from curb to curb.
S
P
is the average walking speed in feet per second (typically 3.5 to 4
feet per second).
Volume-Density Phase Settings
In the 1950s, the Automatic Signal Company introduced two new and complex traffic signal
controllers, the Model 1022 and the Model 1033. These controllers had far more timing
circuits than any controllers used before or since. Although all of the timing parameters
were well-founded in theory; in practice, many did not actually improve the performance of
the intersection. There were several reasons for this experience: it was not possible to
determine which of the many timers actually caused a particular phase to terminate; the
analog timing circuit technology available at the time was subject to variations based on
temperature and humidity; and like today, few engineers had the time necessary to fine-
tune the operation. Of the many features of these innovative controllers, two features
(variable initial and gap reduction) have evolved and are typically available with today’s
controllers. These two features are explained below.
Variable Initial
To successfully employ the volume density features of a controller, it is necessary to
have phase detection farther upstream than that which is normal. This enables the
controller to sample traffic on the approach with a minimum impact from a standing
queue. Detection 300 to 400 feet upstream from the stop line is typical with volume
density operation. With detection this far back, the minimum green would be quite
long—35 seconds with the detector back 400 feet. Since a minimum green this long
would result in very sluggish operation when the demand is light, two other timing
circuits are used to mitigate these impacts: Added Initial and Maximum Initial.
Added Initial – This interval times concurrently with the minimum green interval.
The value is the amount of time that is added when each vehicle actuation is
34
received during the initial period. The actual minimum green time used by the
controller is the greater of the minimum green or the added initial sum. The added
initial cannot exceed the maximum initial. The added initial allows the duration of
the minimum to vary between the actual minimum and the time required to
discharge the maximum queue that can be stored between the stop line and the
detector.
Maximum Initial – This is the maximum period of time for which the added initial
can extend the initial green period. The maximum initial cannot be less than the
minimum green.
Gap Reduction
Gap reduction is the other legacy concept that is used on the modern controller.
This parameter is used to allow the “gap seeking” logic of the actuated controller to
identify a smaller gap in traffic to justify terminating the phase earlier than that
which is implied by the passage time. Gap reduction is a means of reducing the
passage time or gap on the basis of the time that opposing vehicles have waited. In
effect, it benefits the waiting vehicles by reducing the time allowed between vehicles
arriving on the green phase before that phase is terminated. There are three timing
parameters associated with the gap reduction feature: Time-Before-Reduction, Time-
to-Reduce, and Minimum Gap.
Time-Before-Reduction – This period begins when the phase is green and there is
a serviceable call on a conflicting phase. When this period is completed, the linear
reduction of the passage time begins.
Time-To-Reduce – This period begins when the time-before-reduction ends, and
controls the linear rate of reduction until the gap is reduced to the minimum gap.
Minimum Gap – Like the passage time, this parameter extends the green interval
by the minimum gap time for each vehicle actuation up to the maximum green. It
begins timing when the vehicle actuation is removed. This extension period is
subject to termination by the maximum green or a force off.
Controller Timing Parameters Summary
There are 12 controller timing parameters that are commonly used:
1. WALK Establishes the length of the Walk interval.
2. PED CLEARANCE Establishes the length of flashing Don’t Walk interval.
3. MINIMUM GREEN Establishes the length of initial state of green interval.
4. PASSAGE TIME Establishes the increment of right-of-way (green) time
extension for each vehicle actuation during the green
interval.
5. MAXIMUM GREEN Establishes the maximum limit to which the green
interval can be extended on a phase in the presence of a
serviceable demand on a conflicting phase.
35
6. ADDED INITIAL Density feature. Establishes number of seconds by
which each vehicle (actuation) increases the initial state
of green during non-green time on the phase.
7. MAXIMUM INITIAL Density feature. Establishes the maximum limit to
which the initial interval can be extended on a phase.
8. TIME B4 REDUCTION Density feature. Establishes a preset time before the
allowed gap (passage time) begins to reduce.
9. TIME TO REDUCE Density feature. Establishes time in which the allowed
gap is reduced from passage time to minimum gap, after
the time before reduction has expired.
10. MINIMUM GAP Density feature. Establishes minimum value to which
allowed gap between actuations on phase with green can
be reduced upon expiration of time to reduce.
11. YELLOW CHANGE Establishes the length of yellow interval following the
green interval.
12. RED CLEARANCE Establishes the length of red clearance interval following
the yellow interval.
36

V. Coordination Timing Issues
There are three parameters that determine how a controller functions in a coordination
mode: cycle length, offset, and split. While all three parameters are important to the
efficient operation of a signalized arterial or network, it might be argued that the cycle
length is the most important of these parameters because it determines the periodicity of
the system.
Resonant Cycle
In the discussion of the cycle length, we introduce the concept of the resonant cycle length
8
.
That is, for regular linear and grid networks, there are one, two, and sometimes three cycle
lengths that provide much better operation than other cycles. In other words, the concept
of a resonant cycle is a cycle length that accommodates good two-way progression. The
resonance (and non-resonance) of a cycle time stems from the principle that intersection
spacing precludes good progression at certain cycle lengths, and conversely, some cycle
lengths necessarily preclude progression on an arterial due to their incompatibility to the
network geometry. The second essential element of a resonant cycle is that it continues to
provide good two-way arterial progression over a range of volumes.
Resonant cycles naturally arise on arterials as a function of what cycle provides good two-
way progression for given intersection spacing, vehicle speeds, volume levels, saturation
flow rates, and phase sequencing. Time-space diagrams can be used to provide a
convenient means of conveying the traffic flow mechanics that give rise to the resonant
cycle. The results of the experiments, taken as a whole, suggest that well-chosen cycle
lengths scheduled by time-of-day or selected from a table dynamically could yield better
progression, delay, and travel time performance than an on-line incremental adjustment
strategy based on maintaining a constant, target degree of saturation for the single most
congested intersection—a typical adaptive control strategy.
Optimizing an arterial signal-timing plan (cycle, splits, and offsets) for a singular set of
input volumes can be handled in a straightforward manner by using signal-timing
optimization software such as Transyt-7F or Synchro. However, a much more challenging
task is compiling a set of time-of-day (TOD) signal-timing plans and a TOD schedule for
each day of the week to accommodate all hourly and daily fluctuations in traffic conditions
typically experienced during the week.
There are currently no commercially available off-the-shelf tools to address this problem,
and even the literature offers very little in terms of structured guidance to accomplish this
task. The decisions to be made include the following:
• Select a workable number of plans. For example, 15 signal-timing plans usually are
not practical. A typical day might minimally consist of four plans: the AM peak, PM
peak, off-peak day, and off-peak night. Also, for areas in the vicinity of major
shopping facilities, one might consider a special plan to accommodate shopping
traffic demand.
8
“Resonant Cycles in Traffic Signal Control,” Shelby, S.G., Darcy Bullock, and Dougles Gettman,
TRB Meeting, January 2005.
37

• Construct a schedule. Each hour of the week must be covered by a signal-timing
plan. For example, the schedule determines when the AM peak plan starts and ends,
subsequently switching to the off-peak plan.
• Determine the input volumes to generate each plan. Over the hours that each
signal-timing plan will be in operation, traffic conditions may fluctuate significantly.
However, signal-timing optimization software only accepts a single set of input
volumes to generate a corresponding plan. For example, a user might use the peak-
hour flows observed over the whole time frame a plan will be in effect.
The decisions are all interrelated. For example, the number of workable plans may depend
on the number of “distinct” traffic conditions that can be discerned. The construction of the
schedule will depend on the number of timing plans that are appropriate through a given
day. The input volumes will depend on what time of day a plan is in effect. Until very
recent publications, engineering judgment was the only guide to making these decisions.
A paper published in 2002 suggests that a statistical clustering algorithm, based on
volumes approach to the arterial’s critical intersection, be used to determine “break-points”
(or switch points) between TOD plans in the daily schedule.
9
A subsequent paper, published in 2004, suggested flaws with using volume clusters and
recommended that 90th percentile volumes (of a set of several TOD observations) of the
critical intersection be used instead to optimize its cycle length based on a uniform delay
equation.
10
These plans would then be evaluated over several TOD intervals (using a
genetic algorithm) to optimize the TOD schedule of the critical intersection.
Intersection Categories
In the signal network to be retimed, all intersections can be divided into two categories:
primary intersections and secondary intersections. The primary intersections have the
highest demand-to-capacity ratio and will, therefore, require the longest cycles. These
intersections are usually well-known to the traffic engineer. They are the intersection of
two arterials, the intersections with the worst accident experience, the intersections that
service the major shopping centers, and the intersections that generate the most
complaints. The secondary intersections generally serve the adjacent residential areas and
local commercial areas. They are usually characterized by heavy demand on the two major
approaches and much less demand on the cross-street approaches.
The purpose of assigning intersections to one of these two categories is to reduce the
locations where traffic counts are required. The primary intersections require turning
movement traffic counts—there is simply no other way to measure demand. However, the
secondary intersections usually have side street demand that can be met with phase
minimum green times. The strategy, therefore, is to concentrate the counting resources at
9
Smith, B. L., W. T. Scherer, T. A. Hauser, and B. Park, “Data-Driven Methodology for Signal Timing Plan
Development: A Computational Approach,” Computer-Aided Civil and Infrastructure Engineering, Vol. 17, 2002,
pp. 287-395.
10
Park, B., P. Santra, I. Yun, and D. Lee, “Optimization of Time-of-Day Breakpoints for Better Traffic Signal
Control,” TRB 83rd Annual Meeting Compendium of Papers. CD-ROM. Transportation Research Board, National
Research Council, Washington, D.C., 2004.
38
the locations where there is no substitute, and to use minimum green times for the minor
phases at secondary intersections.
Number of Timing Plans
A unique timing plan is required whenever a cycle length, offset, or split is different from
the previous setting. When a new timing plan is selected, the controller must “transition”
to the new plan. During this transition period, systematic operation in the network is
interrupted while each controller adjusts to the new parameters. Because of this
disruption, transitions are minimized and one must be assured that the benefits of the new
plan overcome the disbenefits of the transition period.
One way to determine how many timing plans are needed is to assume that a new plan is
needed whenever there is a significant change in the traffic demand. This may be assessed
by evaluating the changes in demand by hour and by direction. For the network, array the
northbound, southbound, eastbound, and westbound in a table where the directional flows
are in columns and the rows represent the hourly data. Have a column of the table
represent the sum of the four directional flows. Examine this column to identify the time
during which there is a significant change in the total demand; this is an indication that
different cycle length (new timing plan) may be warranted.
Assuming that the major flows are on the north-south street, calculate the basic split by
dividing the greater of the northbound or southbound by the total intersection demand for
the period. When this ratio changes is a good indication of the need for a new plan to
accommodate a new offset. Periods when a new plan may be warranted are identified by
the changes in either the total demand or the split demand.
Using the Tool Box
We have placed a significant emphasis on discussing resonant cycle lengths because plan
changes involving different cycle lengths are very disruptive during the transition period.
In contrast, timing plan changes that involve different offsets with the same cycle length
are relatively benign, and plan changes that only involve split differences are generally
unnoticed. It is important, therefore, to identify the resonant cycle and use this cycle for as
many plans as possible.
When a computer model is not available, we suggest that the following procedure be
followed:
1. Cycle – For each primary intersection, calculate the cycle length required using
Webster’s equation as defined in Section 4.1. For each signal group, determine the
resonant cycle length using the equations provided in Section 4.2. Select the longest
cycle for the timing plan.
2. Split – For each primary intersection, determine the intersection splits using the
Critical Movement method explained in Section 4.5 and the selected cycle. For each
secondary intersection, determine the time required for each minor movement using
the Greenshields-Poisson method and the cycle explained in Section 4.6. Check both
primary and secondary intersections for pedestrian timing requirements and adjust
as necessary.
39
The purpose of obtaining count data is to use it as input to a timing model. The
timing model then generates the appropriate signal settings. There is an alternative
way, which is to estimate the settings directly. This is being performed when
estimating the minimum phase time for the cross-street movements at a secondary
intersection. The turning movement data at the primary intersection might show
that the cycle length for the group should be 100 seconds. If we allow a phase
minimum of 10 seconds and assume 5 seconds for the change and clearance
intervals, then we can determine that the side street split should be 15 percent. To
work the numbers another way, there will be thirty-six 100-second cycles per hour.
Ten seconds is sufficient time to discharge three to four vehicles per cycle. In other
words, this strategy will provide enough capacity to discharge approximately 125
vehicles per lane in an hour. As long as the demand is less than the 125 vehicles per
lane, this approach will work fine.
This example describes one way to estimate secondary intersection split, given the
cycle length. For system timing, we must also have a means of estimating the third
parameter, the offset. We can do this for two conditions: when the demand in one
direction is predominant and when the demand is relatively balanced.
3. Offset – Determine the offsets using the Kell method as outlined in Section 4.4.
When using the Kell method (or any maximum bandwidth method), the practitioner
has several options. The most obvious, and most frequently used, is to consider an
arterial as single entity. This will generally result in balanced bandwidths in both
directions.
During periods of directional flow, however, it may be useful to consider a minor
variation. Within any arterial group, the signals can be clustered in subgroups. The
intent is to cluster signals that have similar link lengths into subgroups. The Kell
method is then applied to each cluster, which by virtue of the similar link lengths,
will have good progression in each direction. The offsets within the subgroups are
those generated by the Kell method. The offset between clusters is set using the
one-way method defined in Section 4.3 to favor the peak directional movement. This
technique assures good progression in the peak direction while providing good
progression within the clusters in the counter-flow direction.
During periods of heavy directional flow, it may be necessary to ignore the contra-
flow traffic to accommodate the peak directional demand. In this instance, all of the
offsets are developed using the one-way method as described in Section 4.3.
40

VI. Signal Timing Examples
One way to illustrate how the tools and techniques presented in this document can be used
to develop good signal timing plans on a shoestring (low budget) is to provide an example.
Three different examples are discussed illustrating different measures that could be used
depending on the available resources.
Moderate Signal Timing Budget
In this example, an agency retained a consultant to prepare signal timing plans for a
suburban arterial three years ago when the arterial was widened and new controllers were
installed. The new timing plans worked well in the beginning, but as development
increased in the corridor, some obvious problems are beginning to emerge. Most of the
problems can be related to the opening of the new shopping center with major signalized
entrances at two of the 10 signals in the corridor. Although a consultant prepared the
existing signal timing plans, the agency required the consultant to develop the timing plans
using the same program that the agency uses, and required the consultant to deliver all of
the data input files for the program.
1 – Identify the System Intersections
In the example, this is obviously the 10 intersections described in the arterial.
2 – Collect and Organize Existing Data
This is a critical step in minimizing the cost of developing new plans. In the
example, one can assume that there are turning movement counts available for all
10 intersections—the only problem is that they are three years old and there have
been changes in the traffic demand in the corridor. Nevertheless, it is likely that
some of the existing turning movement data can be updated and used in developing
the new plans. However, new turning movement counts probably will be required
for the two intersections that are the entrances to the shopping center.
Another type of data that will prove to be very useful is a 24-hour directional count
on the arterial. The directional count can be used to estimate any overall change in
the traffic demand during the last three years. Factors developed using these data
can be used to adjust the three-year-old turning movement counts to reflect the
current demand.
The agency is fortunate in that other data that would normally be collected (e.g.,
distance between intersections, intersection geometry, signal phasing, and the like)
is already available and coded in the optimization program input files. For the most
part, the agency only has to update the traffic demand information and rerun the
program to obtain updated signal timing plans.
3 – Conduct Site Survey
Although many engineers are tempted to skip this step, experience has shown that a
visit to the site during the hours for which the timing plans are being developed can
be very beneficial.
41
Specific things to look for are unusual demand conditions. In the example, the
timing at the two intersections affected by the shopping center needs to be
updated—one might assume that the signal settings at the other eight intersections
may be pretty good. This can be confirmed by a quick trip to the location during the
peak periods. This field visit frequently exposes additional issues that can be
readily addressed with new timing plans.
4 – Obtain Turning Movement Data
This is the key step in minimizing the cost of developing signal timing plans. In the
example, assuming that the 24-hour data can be used to update the old turning
movement counts and that the site visit did not uncover a latent demand condition,
new counts would be needed only at the two intersections that are heavily impacted
by the shopping center. The 24-hour directional count data is used to reaffirm that
the arterial should continue to operate with four timing plans.
To obtain the turning movement data, the agency will conduct short counts during
the AM peak, PM peak, afternoon, and evening periods at the two locations. The
times when the short counts are scheduled are determined from the 24-hour
directional data. Factors developed from the 24-hour directional data are used to
update the existing turning movement counts at the remaining eight intersections.
5 – Calculate Local Timing Parameters
Because there is no significant change proposed to the operation of the individual
controller, there is no need to change any of the local timing parameters.
6 – Identify Signal Groupings
Because there is no need to change the structure of the system, there are no changes
required in the grouping of the signals.
7 – Calculate Coordination Parameters
Once the turning movement data are available, it is a simple matter to update the
input files and rerun the optimization program.
8 – Install and Evaluate New Plans
The physical installation of the new timing plan parameters is usually
straightforward, but a task that is done manually offers the potential for significant
errors. A major concern in the installation phase is verification that the optimized
parameters are, in fact, the parameters that are installed.
The second issue in this step is evaluation of how effective the new settings are. For
agencies that have some resources that can be applied to signal timing issues,
evaluation is an area that provides increasing benefits over time. To evaluate the
timing plans developed in this scenario, two separate types of studies are
recommended: travel time and stopped-time delay. The travel time studies of a
route up and down the arterial will provide a quantifiable measure of the traffic
performance in the corridor. To compliment this information, delay studies at
selected intersections will provide insight to the operation of specific intersections.
In the example, consider making delay studies at the two intersections where
entirely new plans were installed. In addition, it is appropriate to make delay
42
studies at the critical intersection in the group. The critical intersection is generally
the most congested; it is the intersection that drives the cycle length for the group.
The combination of travel time studies and delay studies will provide an excellent
baseline condition against which future changes in signal timing can be compared.
Modest Signal Timing Budget
The second example uses a similar geometric situation with an entirely different system
history. In this case, there is a 10-intersection arterial; but until now, all intersections have
operated as full-actuated, isolated signals. The agency has just hired an electrical
contractor to install new controllers, interconnect cable, and an on-street master. This is
the classical installation of a “closed loop” system. To save scarce funding, the agency plans
to develop the timing plans themselves and has limited resources for this effort.
1 – Identify the System Intersections
In this second example, it is obvious that the 10 intersections will constitute the
signal system.
2 – Collect and Organize Existing Data
The use of existing data is even more critical in minimizing the cost of developing
new plans. In this example, one can assume that there are turning movement
counts available for all 10 intersections, but the turning movement counts were
made during different years. Some of the existing counts are more than 10 years
old. While there have been changes in the traffic demand in the corridor over the
last 10 years, most of the development has taken place on the East side. It is likely
that some of the existing turning movement data at intersections on the West side
can be updated and used for developing the new plans. However, new turning
movement data will likely be required for the five intersections on the East side.
As with the first example, the 24-hour directional count on the arterial will prove to
be very useful. If a recent directional count is not available, one must be made as a
first step. Hopefully, there are older 24-hour counts that are available and can be
used to develop factors to adjust the existing turning movement counts to reflect the
current demand.
Although the available funds are modest, the agency owns a signal timing
optimization program and plans to use it. This decision may cost a little more in the
short run, but it will allow the agency to easily revise the signal timing plans in the
future when the input file is updated with new turning movement counts. In the
meantime, it is necessary to collect all of the descriptive required by the program.
This descriptive data includes the following:
• A condition diagram of each intersection showing the number of lanes and
width of each lane on all approaches. The condition diagram must have a
North arrow and show the street names.
• A phasing diagram for intersections with existing controllers. It is important
for the phasing diagram to include the NEMA phase number for each phase
movement. The phasing diagram must also show all overlaps (if any).
43
• Distance between intersections and the free-flow travel speed for the
conditions under which the timing plan will operate. This information should
be depicted on a map of the area showing the roads and signalized
intersections. It is not necessary for the map to be drawn to scale, but it is
important for each link on the map to be long enough to be able to show
various data such as link length, speeds, and volume.
With this information in hand, particularly the 24-hour directional count, the
engineer can begin making some difficult decisions concerning turning movement
data. A first step is to identify each intersection as either primary or secondary. As
previously noted, the primary intersections are the ones that are the most congested
and that drive the cycle length requirements. Another initial step is to determine
how many timing plans are required for the facility. Using the methodology that
compares total intersection and directional volume hour by hour is a good indication
of when new timing plans are needed.
The engineer has three options to obtain the turning movement data that is
necessary to run the optimization program: update the existing counts, make new
counts using short-count techniques, or estimate the turning movements using a
program like Dowling Associates’ TurnsW. With the provided scenario, one would
tend to update the intersections on the West side (lowest growth) and make new
short counts at the intersections on the East side. The estimated counts could be
used at secondary intersections on the West side if data collection costs were a major
limitation.
3 – Conduct Site Survey
To save time and cost, many engineers are tempted to skip this step. This would be
a mistake. Experience has shown that a visit to the site during the hours for which
the timing plans are being developed will be beneficial.
4 – Obtain Turning Movement Data
This is typically the most costly step in the signal timing process. After making the
best possible use of the existing data as previously described, this step provides for
the field data collection of turning movement counts.
5 – Calculate Local Timing Parameters
Because the existing controllers are operating in the full actuated mode, the local
timing parameters probably do not require any change.
6 – Identify Signal Groupings
Because there is no need to change the structure of the system, there are no changes
required in the grouping of the signals.
7 – Calculate Coordination Parameters
Once the turning movement data are available, it is possible to run the optimization
program.
44
8 – Install and Evaluate New Plans
The physical installation of the new timing plan parameters is usually
straightforward, but any task that is done manually offers the potential for
significant errors. A major concern in the installation phase is verification that the
optimized parameters are, in fact, the parameters that are installed.
The second issue in this step is evaluation of how effective the new settings are. For
agencies that have few resources, the evaluation frequently must be subjective.
Nevertheless, this element is a very important part of the signal timing process.
Rather than conducting formal travel time studies, the engineer may simply drive
the arterial several times looking for discontinuities in the traffic flow or congestion
where none was expected. These informal evaluations must be conducted during the
periods for which the timing plans were developed. The engineer should pay
particular attention to any instances of cycle failure (approach demand is not met
during a green phase) as an indication of a serious deficiency.
Minimum Signal Timing Budget
The third example involves developing signal timing with the absolute minimum of
resources. This example is similar to the previous example, except there are only five
intersections on the arterial and all are currently operating as isolated, actuated
controllers. However, the controllers have time-based coordination capability, and the
engineer wants to use this function.
In the previous examples, the cost of preparing the plans was minimized by reducing the
cost of the data collection effort necessary to run the optimization software, specifically, the
turning movement counts. With this absolutely minimalist approach, a different process is
used. Instead of estimating the input data, the process involves estimating the parameters
(cycle length, split, and offset) themselves using time-space geometry and estimates based
on engineering judgment.
1 – Identify the System Intersections
In the example, the system consists of the five intersections.
2 – Collect and Organize Existing Data
As with the previous examples, the practitioner must make maximum use of
existing data, especially existing timing data and system layout information.
3 – Conduct Site Survey
This step is absolutely vital with the minimalist approach. The practitioner must
carefully observe each of the five intersections for several cycles during the period
for which the timing plan is being developed. In this survey, the practitioner must
estimate the average speed of the traffic between intersections on the artery, and if
not available in the existing data, the practitioner must measure the distance
between intersections.
As with the previous examples, specific issues to look for are unusual demand
conditions, pedestrian demands, and any congested movements. The primary
output of this effort is the identification of the primary intersection in the group.
45
4 – Obtain Turning Movement Data
With the minimalist approach, the practitioner must obtain current turning
movement information for the primary intersection usually by using short-count
techniques as with the previous examples. In addition, the practitioner must obtain
24-hour directional counts on each of the four major approaches to the primary
intersection.
At secondary intersections, the practitioner must observe the operation of the
intersection for several cycles and record the average phase time for each phase
during the cycle.
5 – Calculate Local Timing Parameters
Unless a problem is identified during the site survey, there is usually no need to
change any of the local timing parameters.
6 – Identify Signal Groupings
Because there is no need to change the structure of the system, there are no changes
required in the grouping of the signals.
7 – Calculate Coordination Parameters
In the previous two examples, this step involved running an optimization program.
With the minimalist approach, this step involves estimating the coordination
parameters directly.
Cycle Length – The cycle length must be selected for the group based on meeting
three criteria: optimum cycle length, resonant cycle length, and pedestrian
constraints.
Using the turning movement information at the primary intersection, calculate the
optimum cycle length using Webster’s equation:
Cycle Length = (1.5 * L + 5) / (1.0 - Y
i
).
Using the intersection layout and phasing, determine the minimum pedestrian cycle
length:
Ped Minimum Cycle = LT + 14 + W
m
/ S
P +
W
c
/ S
P
+
Y
Where:
LT = Time required for the left turn movements.
14 = (2 * 7) Time that the “Walk” is displayed to cross each street.
W
m
/ S
P
= Width of the main street divided by the pedestrian speed.
W
c
/ S
P
= Width of the cross street divided by the pedestrian speed.
Y = Yellow and All Red time for critical phases.
Using the average distance between the five intersections, calculate the potential
resonant cycles using the following equations:
Cycle = 2 * Distance / Speed
Cycle = 4 * Distance / Speed
46
Cycle = 6 * Distance / Speed
Cycle = 8 * Distance / Speed.
Select the shortest resonant cycle that is longer than the optimum cycle and the
pedestrian minimum cycle. If none of the resonant cycles are longer than the
optimum cycle, select the longest resonant cycle.
Offset – The offset is calculated using the Kell method.
Split – The split is calculated for the primary intersection using the Critical
Movement method. Once the splits are calculated based on demand, they must be
checked to verify that the pedestrian requirements are met. For example, assume
that the calculated splits required 15 seconds for phases 4 and 8. If the minimum
pedestrian time were 19 (7 + 48/4) seconds, then the intersection split would have to
be increased to 19 seconds to accommodate the pedestrian movement.
At intersections other than the primary intersection, the split is based on the
average phase time observations. These averages are converted to a percent of the
cycle, and new splits are calculated by multiplying these percent splits by the new
cycle length. The final split is based on the pedestrian requirement or the average
phase time, whichever is longer.
8 – Install and Evaluate New Plans
As with the other methods, the physical installation of the new timing plan
parameters is usually straightforward, but any task that is done manually offers the
potential for significant errors. A major concern in the installation phase is to verify
that the optimized parameters are, in fact, the parameters that are installed.
This minimalist approach takes many short cuts compared to the steps that would
be followed in a traditional signal timing effort. It is very important for the
practitioners to carefully verify these plans in the field. In fact, in spite of the
objective of minimizing costs, more time and effort should be planned for this task
under this approach than either of the two other approaches that use optimization
software. The new plans should be tested during a period of low traffic demand
conditions before they are used in the period for which they are designed. For
example, a plan for the AM rush hour might be tested in the late morning or early
evening when the demand is usually lighter. This test period should allow the
practitioner to identify any serious discrepancies without having a large negative
impact on traffic operations.
47
U.S. Department of Transportation
Federal Highway Administration
Office of Operations
400 7
th
Street S.W. (HOP)
Washington, DC 20590
Publication No.
FHWA-HOP-07-006
48
